A-Stern
Der
Bei der Breitensuche wird keine «intelligente» Auswahl der Knoten in der Open-List getroffen, die Knoten werden in willkürlicher Reihenfolge verarbeitet. Der
Definition
wobei
Bei der Schätzung muss gelten:
wobei
Dabei ist
Die Funktion
Beispiel
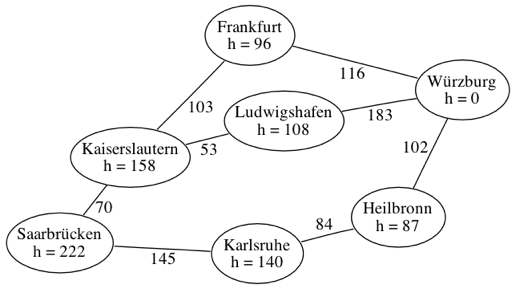
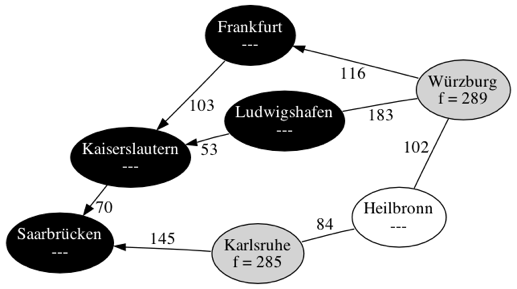
Wir suchen den schnellsten Weg von Würzburg nach Saarbrücken. Durch Abstraktion der Karte haben wir den folgenden gewichteten Graphen erhalten. Zusätzlich kennen wir für jeden Knoten eine Heuristik, nämlich die Distanz der Luftlinie nach Würzburg:
| Karte | Aktion |
|---|---|
 | |
| Schritt 1 | |
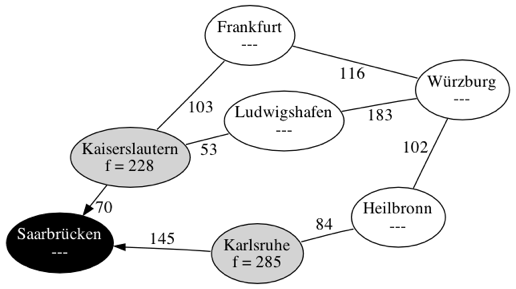 | |
| Schritt 2 | |
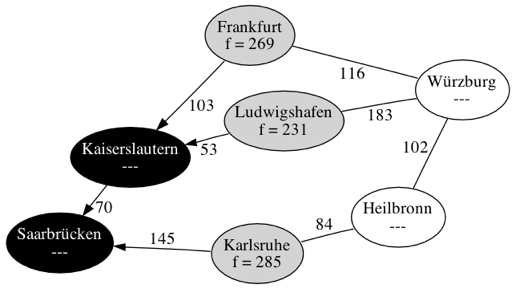 | |
| Schritt 3 | |
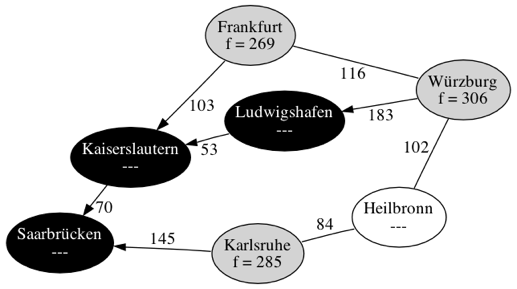 | |
| Schritt 4 | |
 | |
| Schritt 5 | |
 | |
| Schritt 6 | |
 |
Aufgabe
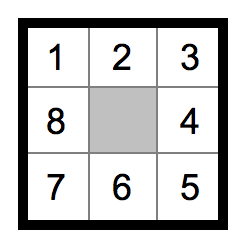
Beim Spiel «8-Puzzle» geht es darum, von einer beliebig durcheinander gebrachten Position der Zahlen durch Verschieben einzelner Zahlen in das jeweils leere Feld die folgende Zielposition zu erreichen:
Der
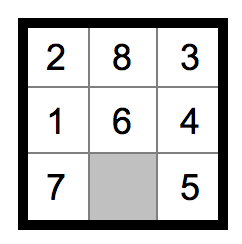
- Finde mittels einer Tiefensuche (maximale Tiefe: 6) den Lösungsweg zur beschriebenen Zielposition aus der dargestellten Ausgangsstellung.
Vervollständige dazu den Suchbaum auf dem Zusatzblatt von links nach rechts bis der Zielknoten erreicht ist. Schreibe neben jeden Knoten die Reihenfolge, in welcher diese besucht werden (z.B. mit roter Farbe) - Denke dir eine Heuristik aus (d.h. definiere die Funktion
), um dieses Problem mit dem zu lösen. Diese Heuristik soll ein Mass dafür sein, wie nahe am Ziel der jeweilige Knoten ist. - Zeichne in den Suchbaum aus Aufgabe 1 ein, wie der
mit deiner Funktion von Aufgabe 2 den Baum absuchen würde. Beginne beim Startknoten und berechne für alle Nachfolgeknoten . Dabei ist die Anzahl bereits zurückgelegten Kanten. Verfolge immer denjenigen Nachfolgeknoten weiter, der den kleinsten Wert von hat. Schreibe neben jeden betrachteten Knoten den Wert der Funktion (z.B. so: (1) mit grün) und die Reihenfolge in welcher die Knoten besucht werden (z.B. <4> mit blau).
Ist derschneller als die Tiefensuche ohne Heuristik? Wie viele Knoten müssen besucht werden? Vergleiche diese Zahl mit denjenigen der Breiten- bzw. Tiefensuche.
program a-star
OPEN.add(startNode)
repeat
bestNode := OPEN.remove(Node with minimal f-Value)
if (bestNode == targetNode) then return bestNode
calcF(bestNode.successors())
OPEN.add(bestNode.successors())
CLOSED.add(bestNode)
until (OPEN.isEmpty)
return no path found
end
2
3
4
5
6
7
8
9
10
11
Vergleich
| Breitensuche | Dijkstra | A-Stern | |
|---|---|---|---|
| Ansatz | «Brute Force» | «Algorithmisch» | «Heuristisch» |
| Voraussetzung | normaler Graph | gewichteter Graph | gewichteter Graph inkl. Heuristik |
Aufgabe
Im Kursmaterialien-Ordner auf Teams findest du die Java-Anwendung PathFinder.jar. Lade diese herunter und verusche sie zu starten (mit Doppelklick, dazu muss aber eine Java-Runtime installiert sein)
Zusatzaufgabe
Lies dich durch den folgenden Beitrag und schau die tollen Visualisierungen an
https://www.redblobgames.com/pathfinding/a-star/introduction.html
Teile übernommen von Ryter, M.: Einführung in die künstliche Intelligenz. http://www.swisseduc.ch/informatik/theoretische_informatik/kuenstliche_intelligenz/ (26.12.2009) ↩︎