
Thymio ist ein Roboter, der an der École polytechnique fédérale de Lausanne (EPFL) in Zusammenarbeit mit der École cantonale d’art de Lausanne (ECAL) für didaktische Zwecke konzipiert worden ist.
👉 Offizielle Webseite von Thymio
Thymio ist Open Source, das heisst dass die Baupläne des Roboters frei verfügbar sind und dass jeder den Roboter selbst nachbauen darf. Auch die Software, mit welcher Thymio betrieben wird, ist frei verfügbar.
Sensoren
Thymio besitzt diverse Sensoren womit er seine Umgebung wahrnehmen kann. 9 Distanz-Sensoren (IR), ein Beschleunigungs-Sensor und ein Temperatur-Sensor werden ergänzt durch ein Mikrofon, 5 Knöpfe und die Fernbedienungs-Schnittstelle
- Knöpfe
- Der Thymio besitz auf der Oberseite 5 Touch-Sensoren – für jede Richtung einen und einen in der Mitte
- Distanz-Sensoren
- An der Vorderseite sind 7 IR-Sensoren angebracht. Das reflektierte Infrarotlicht wird gemessen und daraus die Distanz zum nächsten Objekt bestimmt
- Auf der Unterseite befinden sich zwei weitere IR-Sensoren
- Beschleunigungs-Sensor,
- ein eingebauter Beschleunigungs-Sensor misst Erschütterung und Neigungs-Änderungen des Roboters
- Mikrofon
- das eingebaute Mikrofon kann Ton-Aufnahmen machen und die Lautstärke messen
- Temperatur-Sensor
- ein eingebauter Temperatur-Sensor misst die Umgebungs-Temperatur
- Fernbedienungs-Schnittstelle
- der integrierte Empfänger nimmt Befehle einer kompatiblen Fernbedienung entgegen
Aktoren
- Motoren
- zwei unabhängige Motoren steuern die beiden Räder. Der Roboter kann dadurch sowohl Vor- als auch Rückwärts fahren und dabei Kurven mit unterschiedlichen Radien
- Lautsprecher
- können Töne und Aufnahmen abspielen
- LEDs
- eine Reihe von LEDs kann mit unterschiedlich-farbige Rückmeldungen geben
Eingebautes Verhalten
Die Möglichkeiten von Thymio lassen sich mit den vorprogrammierten Modi erkunden.
Aufgabe
Erkunde die eingebauten Verhaltens-Modi von Thymio
👉 Anleitung Modi von Thymio
Programmieren
So richtig spannend wird es erst, wenn wir den Roboter selbst programmieren. Dazu können wir die Messwerte seiner Sensoren auswerten und Aktionen festlegen.
Aufgabe
Schaffst du es, dass der Roboter der schwarzen Linie folgt und den Parcours ohne Fehler bewältigt?
- Installiere die Thymio Suite:
👉 Thymio-Suite herunterladen - Entscheide dich für eine der Programmiersprachen: entweder das grafische VPL oder Python (siehe weiter unten)
- Programmiere deinen Thymio so, dass er den Parcours bewältigt.

Sprachen und Tools
Thymio lässt sich ganz unterschiedlich Programmieren. In der Thymio-Suite stehen folgende Sprachen und Tools zur Verfügung:

Zwei davon seien hier kurz beschrieben:
- VPL ist mehr oder weniger selbsterklärend und man kann in kurzer Zeit etwas erreichen
- Python kennen wir bereits aus dem Unterricht
VPL
VPL ist eine grafische Programmiersprache. Man legt mit Drag-and-Drop fest, was geschieht wenn ein Sensor etwas bestimmtes misst. Daneben können Zustände verwendet werden, damit sich der Roboter auch Dinge merken kann.
- Links sind die Ereignisse (orange) welche mit den Sensoren wahrgenommen werden können
- Rechts findet man die Aktionen (blau) welche dabei ausgelöst werden können
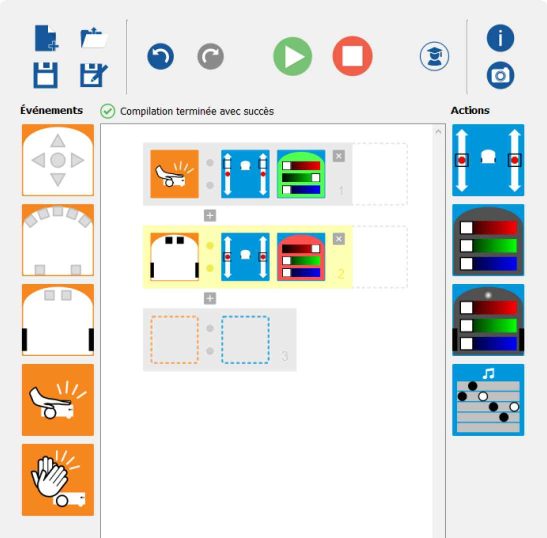
Das abgebildete Programm beinhaltet zwei Events wobei es jeweils zwei Aktionen ausführt:
- Erschütterung
- Thymio fährt vorwärts und leuchtet grün
- Untere Sensoren
- sind diese Dunkel (keine Reflexion des Lichts), dann stoppt Thymio und leuchtet rot
Python
Der Thymio lässt sich auch mit Python programmieren. So ein Programm besteht aus sogenannten events – also Ereignissen. Ein Thymio-Event ist ein Unterprogramm mit einem vordefinierten Namen (z.B. button_left()) und einem @onevent-Dekorator. Der Roboter wird durch Anpassen vordefinierter globaler Variablen gesteuert.
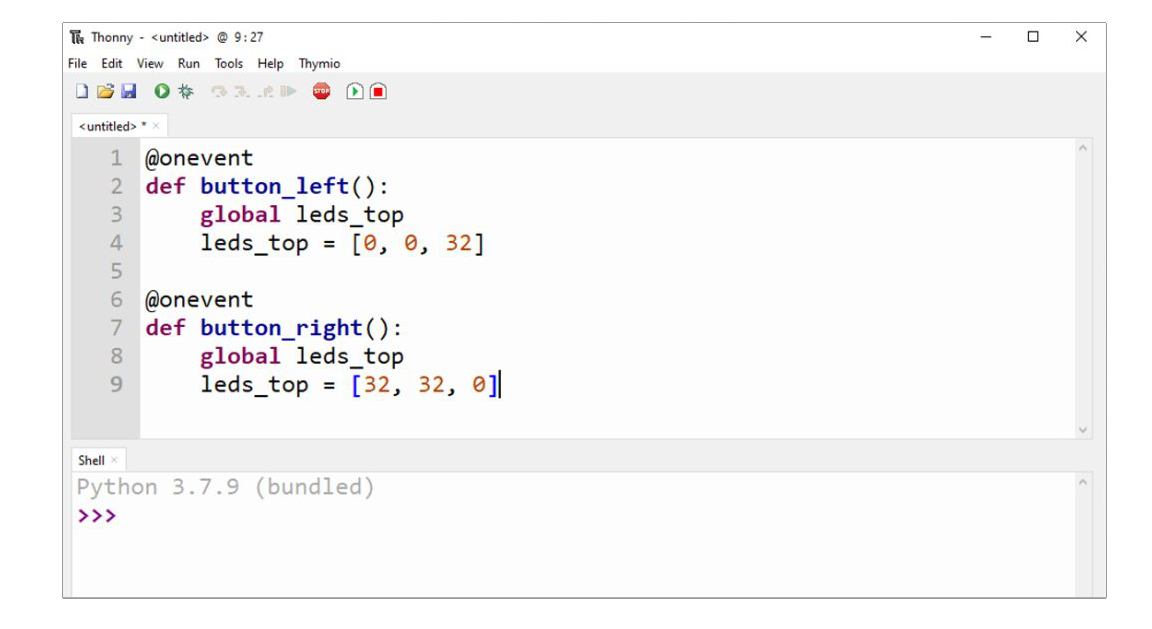
Das abgebildete Programm reagiert auf Knopfdruck und ändert die Farbe der LEDs auf der Oberseite des Roboters.
Auf der Python-Seite von Thymio findet man Beispiele und eine Tabelle zu den Events und globalen Variablen:
👉 Python-Anleitung für Thymio